
ETH Zurich’s Soft Robotics Lab 3D-Prints Robot Hand with Artificial Muscles Using Data from MRI Scans
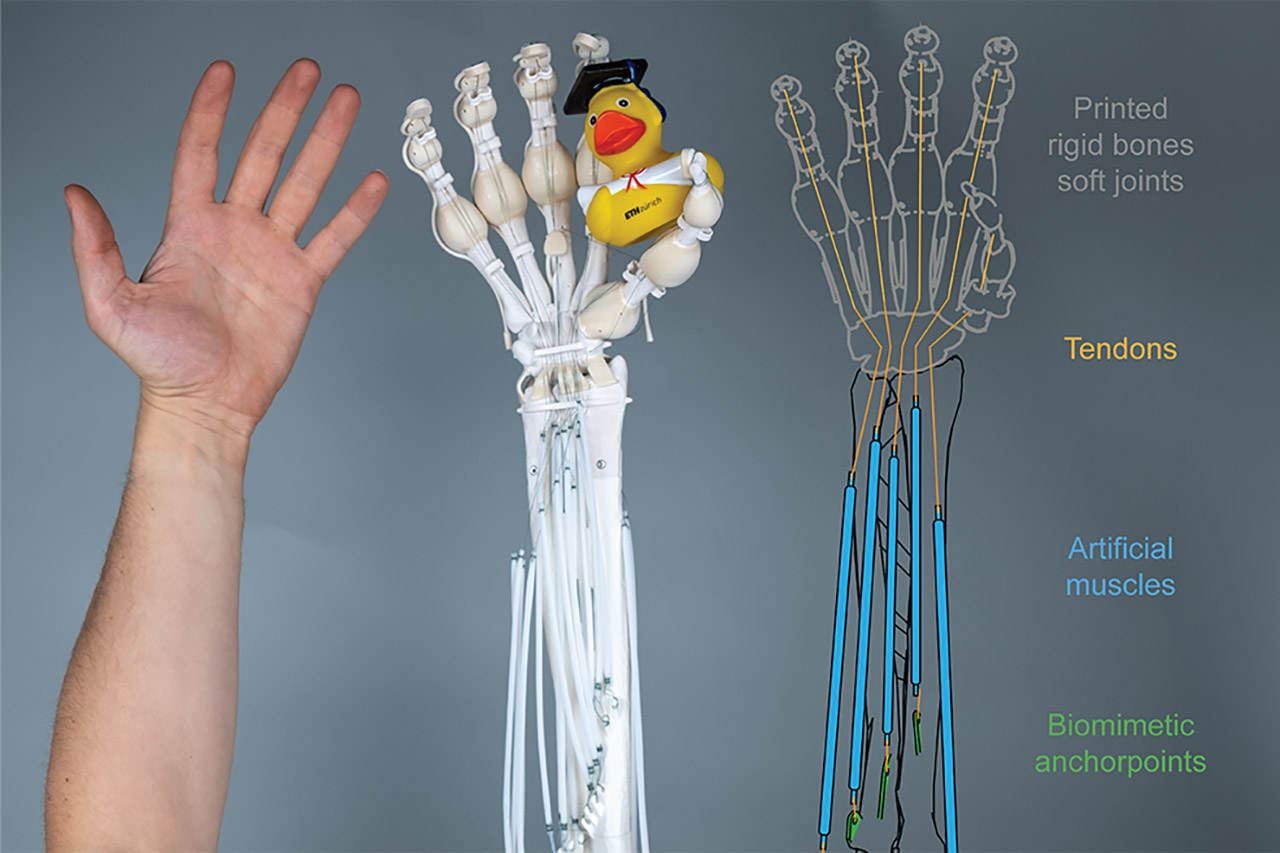
Researchers at ETH Zurich’s Soft Robotics lab have created a robotic hand and forearm that is surprisingly similar to a human. RHAVCJ stands for Replicating Human Anatomy with Vision-Controlled Jetting, which is quite a mouthful. This is a significant step forward in developing robot hands that can be utilized on humanoid robots.
The engineers dug deep, using MRI scans of actual human bones to help create the hand’s hard framework. The joints were then made more flexible by inserting soft tiny capsules. The hand is connected by some rather flexible tendons, and there are tiny small holes on the fingertips and palm filled with a super thin sticky substance that can detect touch. Everything comes together in a single 3D printing process known as vision-controlled jetting. The beauty of this procedure is that it can fire a variety of materials in precisely the appropriate location, eliminating the need for screws or finicky assembly stages.

Bambu Lab A1 3D Printer, Support Multi-Color 3D Printing, High Speed & Precision, Full-Auto Calibration…
- High-Speed Precision: Experience unparalleled speed and precision with the Bambu Lab A1 3D Printer. With an impressive acceleration of 10,000 mm/s…
- Multi-Color Printing with AMS lite: Unlock your creativity with vibrant and multi-colored 3D prints. The Bambu Lab A1 3D printers make multi-color…
- Full-Auto Calibration: Say goodbye to manual calibration hassles. The A1 3D printer takes care of all the calibration processes automatically…
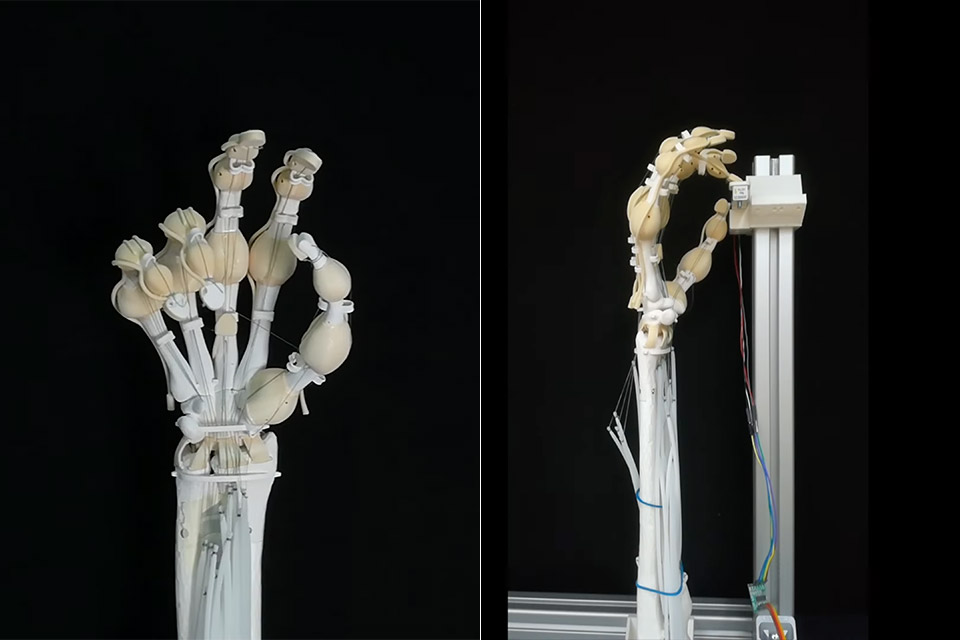
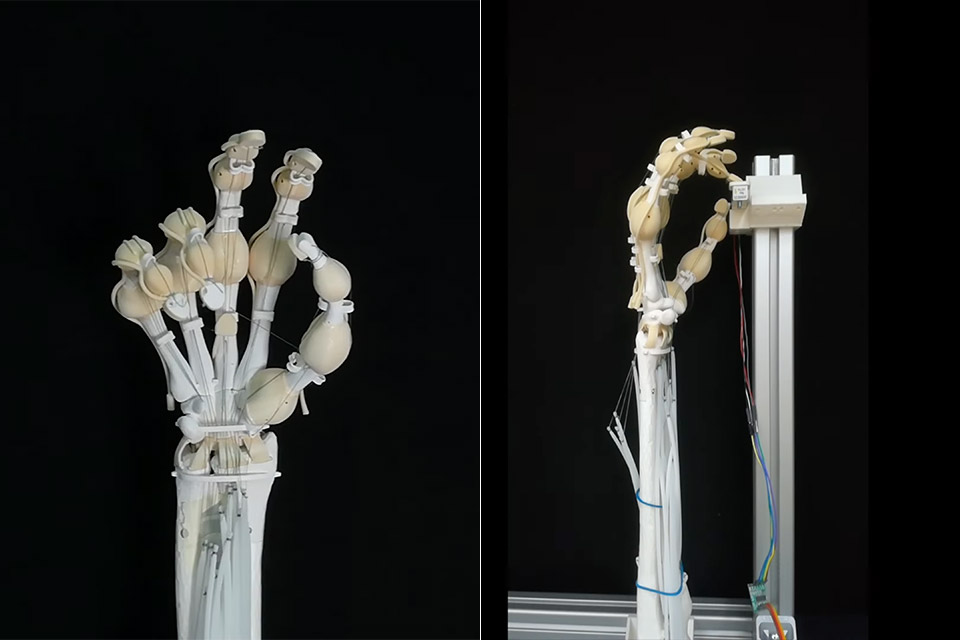
The interesting thing about this version is how it varies from previous attempts to create robot hands. Those employed electric motors to operate the joints, however this one includes 22 distinct artificial muscles inserted in the forearm. Each one is built with the McKibben design, which includes a small rubber tube inside a braid that shortens and thickens as air is forced into it, allowing the fingers to bend. These muscles expand 30.1 percent, which is rather impressive and comes at a lower cost.
The real magic is in their ability to control the 22 muscles independently, allowing them to move each finger with extreme precision. The thumb can even contact the other fingers as a human would, which is very significant for dexterity. Fingers curl and stretch effortlessly, and it can perform a variety of grips.
They’ve been putting this thing through its paces, and it can pick up a variety of objects, including a small coin and a 272-gram can, without dropping them. The force on the fingers is 1.95 newtons, which is ideal for delicate work or solid grips. The case contains touch sensors, which allow it to detect when it is in contact with something.
This small achievement opens up a world of possibilities for humanoid robots that appear and behave like people. Soft joints make them all more flexible and less prone to be harmed if they collide with something unexpected, and the built-in sensors provide excellent real-time feedback. The next phase could be to scale up to full limbs or integrate it with some very powerful control systems.
ETH Zurich’s Soft Robotics Lab 3D-Prints Robot Hand with Artificial Muscles Using Data from MRI Scans
#ETH #Zurichs #Soft #Robotics #Lab #3DPrints #Robot #Hand #Artificial #Muscles #Data #MRI #Scans



